|
I'm a quant and AI researcher at Point72. My current interests are reinforcement learning and foundation models, with applications to algorithmic trading. I completed my Ph.D. at the UPenn GRASP Lab in 3.5 years, working with Professor George J. Pappas, and Bachelor's degree (Summa Cum Laude) from Shanghai Jiao Tong University, where I worked with Professor Xiang Yin. I spent time in both tech (Toyota Research, Tencent AI) and quant finance (Point72). My Ph.D. research develops safe, adaptive, efficient reinforcement and imitation learning-based control policy for multi-agent and robotic systems. Please drop me an email if you are interested in my research or want to have a coffee chat.Email / Linkedin / Github / Google Scholar / GRASP Page |
|
|
(* indicates equal contribution, see full list on Google Scholar) |
|
|
Dynamic Rank Adjustment in Diffusion Policies for Efficient and Flexible Training Key words: Online Imitation Learning, Diffusion Model |

|
Multi-Agent Reinforcement Learning Guided by Signal Temporal Logic Specifications Key words: Reinforcement Learning, Multi-Agent Systems, Safety |
|
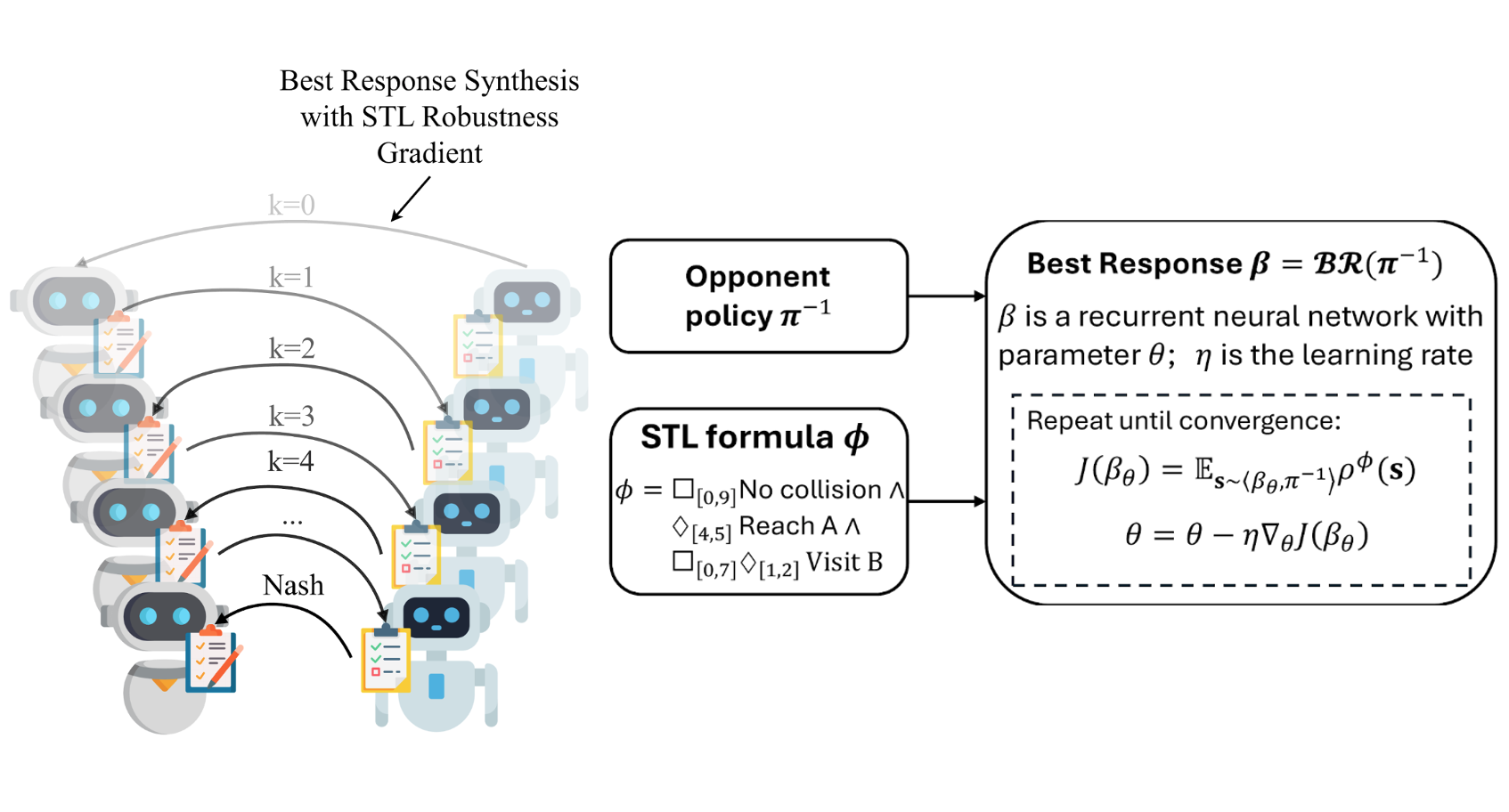
STLGame: Signal Temporal Logic Games in Adversarial Multi-Agent Systems Key words: Multi-Agent Systems, Game Theory, Formal Methods |
|
|
MEGA-DAgger: Imitation Learning with Multiple Imperfect Experts Key words: Imitation Learning, Autonomous Racing, Safety |
|
Learning Adaptive Safety for Multi-Agent Systems Key words: Reinforcement Learning, Multi-Agent Systems, Safety |
|
|
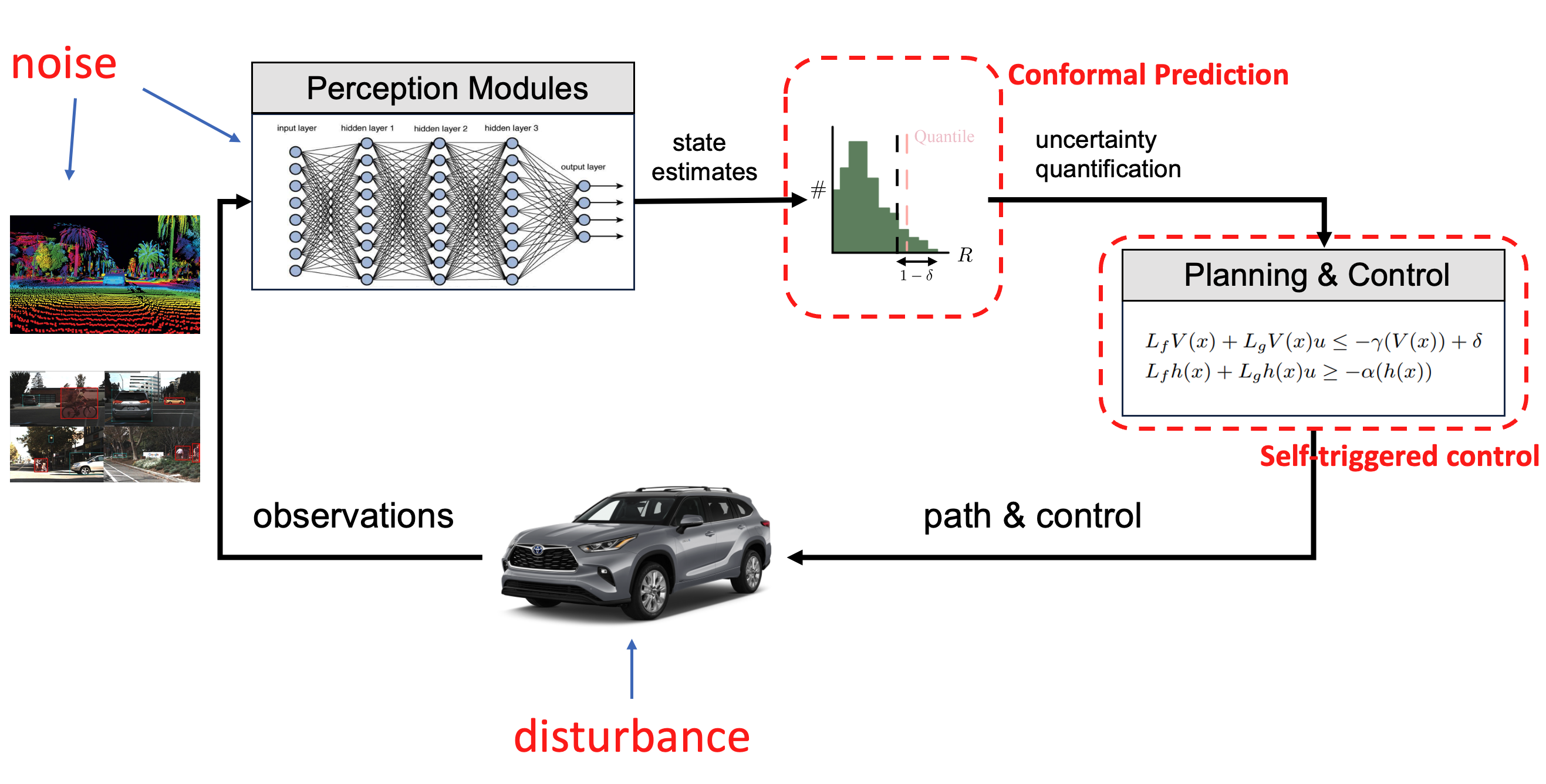
Safe Perception-based Control under Stochastic Sensor Uncertainty using Conformal Prediction Key words: Safety, Uncertainty Quantification, Perception |
|
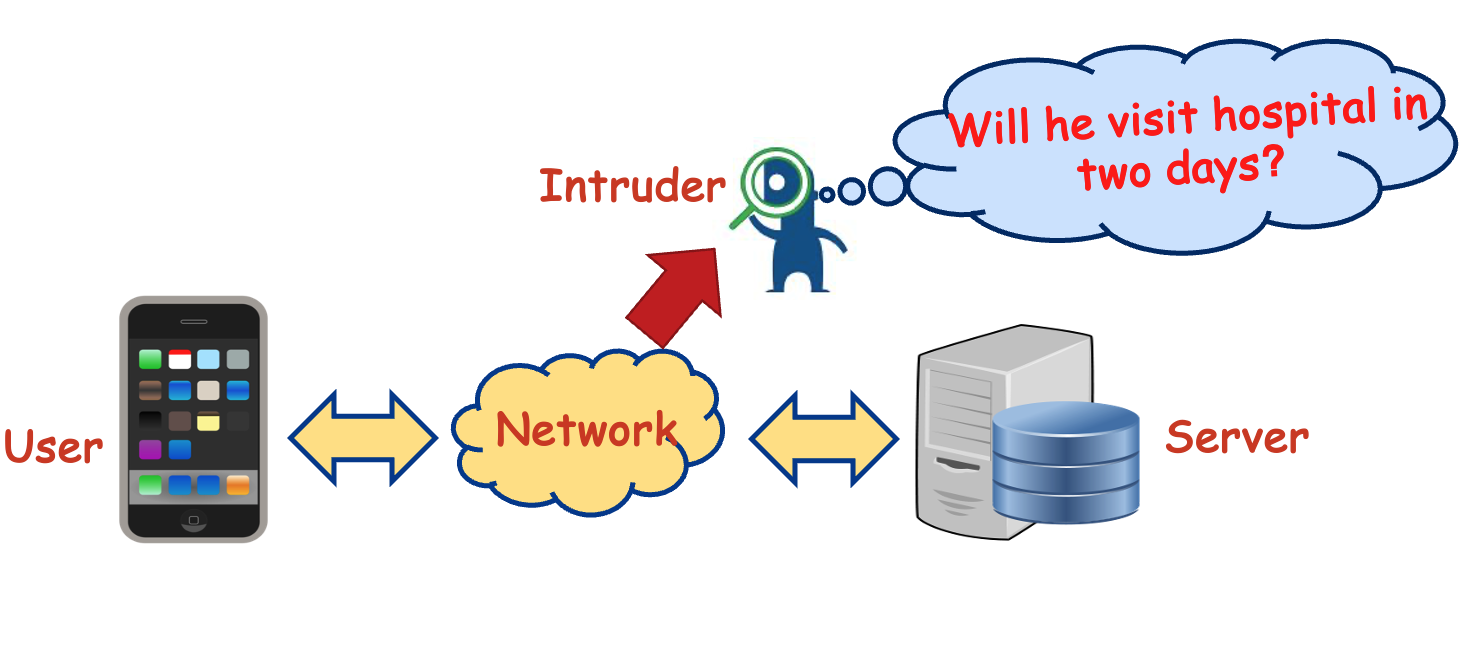
Secure Your Intention: On Notions of Pre-Opacity in Discrete-Event Systems Key words: Information Privacy, Automata Theory |
|
|
|
|
|
Template from here. |